
ACL Digital
June 18, 2025
5 Minutes read
RTOS vs. Bare Metal: Choosing the Right Software Architecture for Embedded Systems
Embedded systems serve as the invisible intelligence behind a wide range of devices, from industrial control units and automotive ECUs to medical wearables and smart home appliances. As these systems evolve in complexity and performance demands, the choice of underlying software architecture becomes critical to achieving design goals like real-time responsiveness, resource efficiency, scalability, and reliability.
One of the earliest and most impactful decisions in embedded software development is whether to adopt a bare-metal architecture, where code runs directly on hardware without an operating system, or to leverage a Real-Time Operating System (RTOS), which introduces task scheduling, inter-process communication, and timing control. Each paradigm presents distinct advantages and trade-offs depending on the system’s complexity, timing constraints, and resource availability. In this blog, we’ll dive deep into the technical landscape of RTOS versus bare-metal development. Through detailed comparisons, real-world performance insights, and application-specific considerations, we aim to provide embedded engineers with a practical framework for choosing the right software architecture for their next embedded design.
What is Bare-Metal Programming?
Bare-metal programming is a software development approach in which application code runs directly on the hardware, without the support of an operating system. This method gives developers complete control over the processor, memory, and peripherals, making it ideal for ultra-constrained or deterministic systems.
A typical bare-metal application begins with startup code that initializes the hardware, followed by a main() loop that manages the core application logic. Interrupt Service Routines (ISRs) handle time-critical events with minimal latency. This deterministic structure enables precise timing control, essential in applications such as motor control, sensor data acquisition, and signal processing.
One of the key advantages of bare-metal systems is their minimal memory footprint and near-zero software overhead, which is perfect for microcontrollers with limited RAM and Flash. Development typically involves toolchains such as ARM-GCC, Keil µVision, or MPLAB X, which leverage compilers, linkers, and debuggers to build and optimize firmware.
Hardware abstraction in bare-metal environments is typically achieved through direct register manipulation or low-level driver libraries. This approach provides granular control over peripherals such as GPIOs, timers, ADCs, and communication interfaces. Although it requires a deep understanding of the hardware architecture, it delivers maximum performance and seamless hardware integration, which is crucial in deeply embedded systems.
What is an RTOS (Real-Time Operating System)?
A Real-Time Operating System (RTOS) is a lightweight operating system specifically designed for managing real-time task execution in embedded systems where deterministic behavior is critical. Unlike general-purpose OSes, an RTOS ensures predictable response times by efficiently managing task scheduling, prioritization, and execution.
Key Components of an RTOS
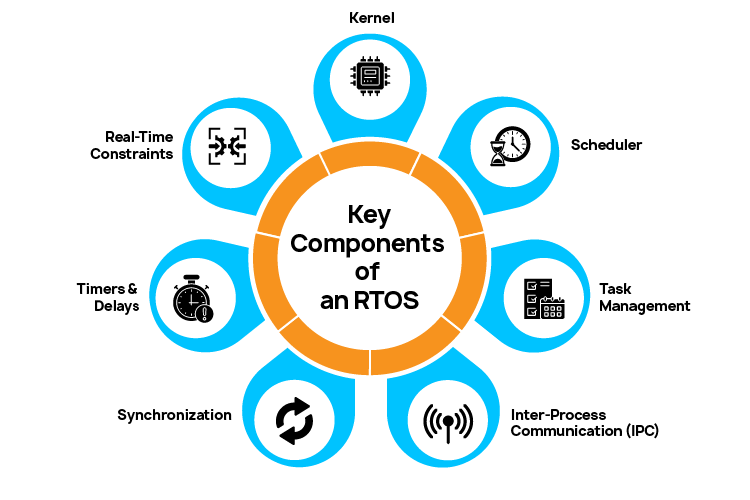
- Kernel: The core of the RTOS that handles task management, resource allocation, context switching, and interrupt processing, all while maintaining deterministic performance.
- Scheduler: Determines which task runs and when. Most RTOSs use preemptive or cooperative scheduling models, including priority-based and round-robin strategies. Advanced systems support deadline-driven scheduling for complex real-time needs.
- Task Management: Supports the creation, suspension, resumption, and deletion of tasks or threads, enabling modular, concurrent application designs.
- Inter-Process Communication (IPC): Includes mechanisms like message queues, semaphores, and mailboxes for safe and efficient data exchange between tasks, preventing race conditions and deadlocks.
- Synchronization: Provides tools such as mutexes, binary semaphores, and event flags to manage shared resources and ensure data integrity.
- Timers and Delays: Integrated support for software timers and precise delays enables time-triggered operations, task scheduling, and protocol timeouts.
- Real-Time Constraints: RTOSs support hard real-time systems, where missing a deadline leads to critical failure (e.g., pacemakers, automotive safety systems), and soft real-time systems, where timing is important but not fatal (e.g., media streaming devices).
Popular RTOS Options
- FreeRTOS: Open-source and lightweight, widely used in commercial-grade MCUs.
- Zephyr: Scalable and secure, ideal for IoT and edge computing applications.
- Micrium OS: Industrial-grade with a modular architecture and deterministic performance.
- VxWorks: Trusted in aerospace, defense, and other safety-critical systems requiring high certification standards.
Key Technical Comparison: RTOS vs. Bare Metal
| Feature | Bare Metal | RTOS |
| Architecture Complexity | Simple startup and main loop; minimal layering | Modular and layered design enabling structured and scalable development |
| Task Scheduling | Manual via main loop and ISRs | Preemptive or cooperative schedulers with built-in priority management |
| Multitasking | Not natively supported; must be manually coded | Native support for concurrent task execution and thread management |
| Interrupt Handling | Direct handling; tight control, but can lead to complex nesting | Priority-based, deferred handling with consistent system behavior |
| Resource Utilization | Minimal memory and CPU footprint | Requires more RAM and Flash due to kernel, stacks, and task management overhead |
| Timing Determinism | High, but fully manual and harder to scale | High, with built-in timers, system ticks, and predictable context switching |
| Debugging & Testing | Simple, low-level debugging at register and memory level | Task-aware debugging, trace analysis, and performance profiling available |
| Maintainability | Harder to scale; tightly coupled codebase | Modular, reusable, and easier to maintain in complex systems |
Industries Leveraging RTOS and Bare-Metal Architectures
Embedded software architectures, whether bare-metal or RTOS-based serve as foundational pillars across multiple industries, each with unique timing, safety, and performance constraints:
- Automotive: RTOS is widely used in automotive ECUs, ADAS, infotainment, and diagnostics systems where real-time scheduling and functional safety are critical. Bare-metal is often deployed in simpler, resource-constrained modules such as sensor interfaces, LIN bus nodes, and data loggers.
- Industrial Automation: RTOS enables real-time control in PLCs, robotic systems, and predictive maintenance frameworks. Bare-metal is preferred for low-power edge devices like sensor nodes, smart actuators, and basic motor controllers operating under tight memory and power constraints.
- Medical Devices: From pacemakers and insulin pumps to portable monitoring systems, RTOS supports deterministic operation under strict regulatory compliance. Meanwhile, bare-metal is ideal for ultra-low-power wearables, fitness trackers, and compact medical sensors where efficiency and reliability are paramount.
- Aerospace and Defense: RTOS platforms like VxWorks and Integrity are standard in mission-critical avionics, radar, and satellite systems. Bare-metal is used in tightly controlled embedded components like guidance systems and environmental sensors.
- Consumer Electronics: RTOS powers advanced functionality in smart TVs, voice assistants, and multimedia hubs. Bare-metal remains widely used in end devices such as smartwatches, digital trackers, smart locks, display controllers, and remote controls where real-time performance and low power consumption are essential.
- Telecommunications and Networking: RTOS is essential for protocol handling, scheduling, and data throughput in routers, modems, and base stations. Bare-metal is often applied in physical-layer components, signal path accelerators, and timing-critical firmware that demands minimal latency and precise hardware control.
Performance and Resource Considerations
When evaluating RTOS versus bare-metal implementations, understanding the implications on performance and resource utilization is vital to optimizing embedded system behavior. Below is a focused comparison based on real-world technical metrics and system-level behavior:
- RAM/ROM Usage: Bare-metal implementations have a minimal code and memory footprint since there’s no kernel or scheduler overhead. In contrast, an RTOS consumes more ROM due to its system services and more RAM for task stacks, IPC structures, and control blocks, often requiring developers to profile memory allocation carefully for scalability.
- CPU Cycles and Context Switching Overhead: Bare-metal systems execute in a linear or interrupt-driven flow, ensuring deterministic use of CPU cycles. RTOSs introduce overhead from context switching and scheduling logic, which can consume several microseconds per switch depending on the MCU and RTOS implementation. This overhead must be accounted for in CPU-bound applications or where tight control loops are essential.
- Power Consumption Patterns: Power usage in bare-metal systems is more predictable and easier to optimize due to direct control of peripherals and sleep states. RTOS-based designs, while offering advanced power management APIs, require careful configuration of idle tasks, tick-less scheduling, and peripheral clock gating to match the deterministic behavior of bare-metal setups.
- Real-World Metrics – Latency, Jitter, Response Time: Bare-metal systems deliver consistently low interrupt latency and minimal jitter, making them ideal for time-critical control. In RTOS environments, latency can vary based on task priorities, interrupt masking durations, and scheduler design. However, when correctly tuned, modern RTOSs with fine-grained preemption and tickless modes can still meet tight real-time requirements.
Application Suitability: When to Use What
Choosing between a bare-metal and an RTOS-based approach depends on the application’s complexity, real-time requirements, and hardware constraints. The table below outlines specific scenarios where each approach is best suited:
| Use Case | Bare Metal | RTOS |
| Application Type | Single-task applications with minimal logic | Multitasking or time-critical applications with concurrent task requirements |
| Power & Cost Constraints | Ideal for ultra-low-power, cost-sensitive devices with tight memory budgets | Requires more memory and CPU overhead; suitable for devices with sufficient resources |
| Timing Requirements | Deterministic timing with minimal latency for critical control loops | Built-in schedulers and timers ensure predictable execution in real-time environments |
| Development Speed | Fast time-to-market with minimal firmware layers | Structured development and easier code scalability, especially for larger codebases |
| Communication Needs | Simple or no communication stacks | Suitable for BLE, Wi-Fi, TCP/IP stacks with asynchronous and time-bound interactions |
| System Complexity | Best for systems with limited functionality and no multitasking | Ideal for applications with GUIs, file systems, and complex event scheduling |
Migration Considerations: Transitioning from Bare Metal to RTOS
As embedded applications scale in complexity, migrating from a bare-metal architecture to an RTOS becomes a logical evolution. However, the transition is not just a matter of replacing the main() loop with tasks; it demands deep architectural foresight, especially in legacy systems where timing precision and hardware control are tightly coupled with the application logic. Below are key technical insights for engineers planning this migration:
- When to Transition: Migration should be considered when your application demands concurrent task execution, asynchronous event handling, integration of communication stacks (e.g., TCP/IP, BLE), or future-proofing for scalability. Typical triggers include adding user interfaces, real-time data logging, or over-the-air (OTA) updates.
- RTOS Integration into Legacy Bare-Metal Code: Begin by identifying self-contained modules within the existing application—e.g., sensor polling, communication handlers, or control algorithms—that can be refactored into RTOS tasks. Retain ISRs for low-latency functions, but move non-critical post-processing to tasks using event flags or queues. Utilize hardware abstraction layers (HAL) where possible to decouple code from platform-specific registers.
- Task Prioritization Strategy: RTOS introduces preemptive multitasking; hence, improper task priorities can lead to starvation or missed deadlines. Engineers must profile timing requirements of each function and assign priorities accordingly, avoiding priority inversion with proper synchronization mechanisms like mutexes and priority inheritance.
- Common Pitfalls to Avoid:
- Timing Drift and Jitter: The introduction of context switching and tick-based scheduling can interfere with timing-critical routines. Use high-resolution timers and minimize reliance on RTOS ticks for precision loops.
- Increased Stack and Heap Usage: Each task requires its own stack; improper sizing can lead to silent overflows. Static memory analysis and runtime stack monitoring tools are critical during migration.
- ISR Conflicts: Legacy systems often perform heavy lifting inside ISRs. In RTOS-based systems, keep ISRs minimal and defer processing to tasks using queues or deferred procedure calls (DPCs) to avoid blocking the kernel scheduler.
- Initialization Order and Race Conditions: Transitioning to an RTOS may introduce boot-time concurrency. Ensure proper task synchronization and peripheral initialization ordering using binary semaphores or startup barriers.
- Debugging During Transition: Utilize RTOS-aware debuggers to monitor task execution, context switches, and inter-task communication. Transition phases benefit significantly from trace tools that visualize task interactions and interrupt latency to identify integration regressions.
As embedded systems grow in complexity and demand greater scalability, transitioning from bare-metal implementations to RTOS-based architectures becomes a strategic move for achieving modularity, real-time responsiveness, and maintainability. However, this transition is far from trivial—it requires deep architectural planning, precise timing control, and awareness of system-level trade-offs to avoid pitfalls like ISR conflicts or unpredictable task latencies. Choosing the right migration approach and optimizing the RTOS integration process can make the difference between a scalable, future-proof system and one that struggles under operational load.
At ACL Digital, we bring extensive expertise in embedded software design, RTOS integration, and real-time system optimization. Our engineering teams have successfully helped global clients modernize legacy bare-metal applications, deploy RTOS-based frameworks, and implement robust multitasking systems across industries like automotive, industrial automation, consumer electronics, and healthcare. From architecture selection and task structuring to timing analysis and debugging, we partner with our clients at every step to ensure their embedded platforms are reliable, deterministic, and built for the future.
Connect with our experts to discuss this in more detail.




