Home / CaseStudy / Smart E/E Design Framework for Industrial Robotics Manufacturer
Smart E/E Design Framework for Industrial Robotics Manufacturer
Overview
The client required a configurable electrical and electronic (E/E) design system for industrial linear robots that could address diverse customer requirements with master–slave multi-axis control, integrated safety protocols, and scalable peripheral options, while ensuring compliance with international safety standards and minimizing engineering effort
Download Case Study
Challenges
Required modular configuration for various robot options based on customer-specific needs
Integration of master-slave control units for synchronized robotic operations
Need for safety-compliant design aligned with industry standards
Solution
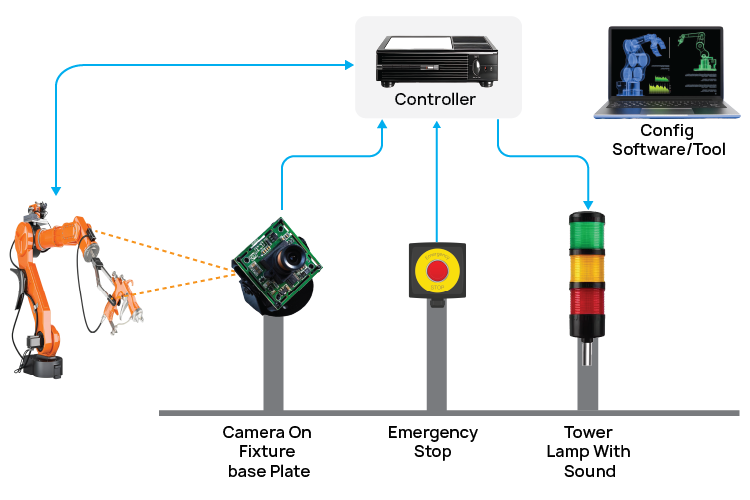
Developed a configurable E/E design with option libraries (axes, payload, conveyors, networks) auto-generating I/O maps, motion objects, HMI pages, and BOMs
Implemented master–slave gantry control with electronic gearing, anti-racking, and absolute encoders
Enabled deterministic motion via EtherCAT/PROFINET with jerk-limited profiles, blended moves, and safe homing
Integrated Pilz PNOZ hardware (E-Stops, gates, light curtains) with LASAL Safety Designer for safe logic (STO, SS1/SS2, SLS, SOS, mode select, zone control)